
Manchester, UK
March 2023

HKUST, HK
Dec 2022

Lion Rock, HK
Dec 2022
Yokohama, Japan
Sep 2019

Yokohama, Japan
Sep 2019

Wulingyuan, China
Jul 2019
KAIST, Korea
Oct 2018

Xiaogan, China
Aug 2018
❮
❯
I am a robotics enthusiast who loves to build and program robots for unmanned misson. I mainly focus on the mechanical design of the robots, which I enjoy designing compact solutions with novel mechanisms.
Left side are some of my projects designed in SolidWorks.
I am also involved in hardware and software development, such as, PCB design, embedded system programming, ROS programming, machine learning, etc.
I received my MPhil in Electronic and Computer Engineering in 2022 and BEng in Mechanical Engineering in 2020 at The Hong Kong University of Science and Technology (HKUST).
In my PG research, I was working in the Robotics Manipulation Lab advised by Dr. Jungwon Seo, which is focused on robotics manipulation, grasping, and gripper design. During my UG study, I was in the SmartCar and Humanoid group of HKUST Robotics Team, where I worked with my teammates to build robots for international competitions.
Below are the highlights of my projects in work, research, and competitions. Click the image to view more!
CubeSat for Space Education [OASA]
I joined OASA to create their first functional CubeSat for space education. This CubeSat resembles the real one with deployment mechanism, reaction control, and camera for observation, which students can assemble it in a 12-hr CubeSat course.
The CubeSat has been mass-producted for the courses delivered in HKPC and PolyU. The design is currently keep improving for better manufacturing and assembly.
See the GitHub repo for technical details: OASA-CubeSat
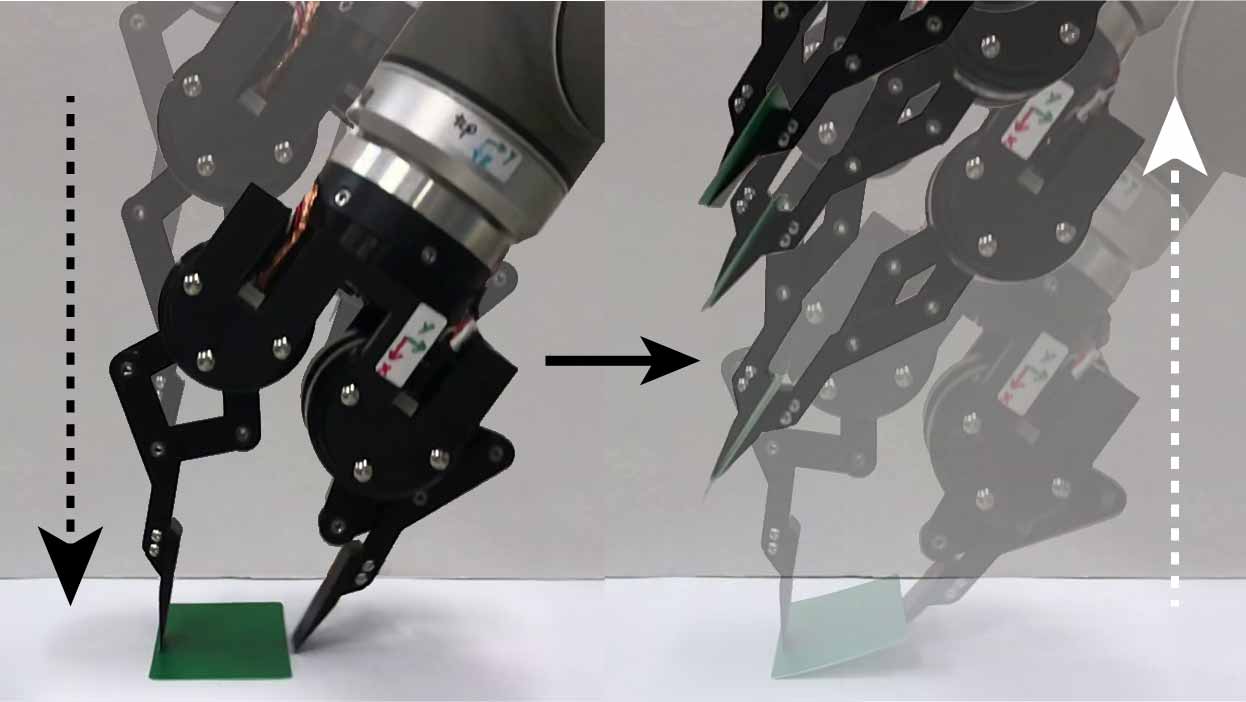
High-Speed Scooping [Research]
High-Speed Scooping is a rapid method for picking up thin objects lying on a hard surface.
Our method takes advantage of a direct-drive gripper to safely interact with the object and support surface during the high-speed operation.
This technique can also be applied to picking fragile objects like cracker and chip.
See our GitHub repo: high_speed_scooping,
direct_drive_hand,
ddh_driver
Parrot-Inspired Gripper [Research]
This gripper imitates the parrot's feeding apparatus of a pair of powerful beaks and a soft tongue.
The gripper is built by retrofitting an off-the-shelf industrial robotic gripper with custom hardware device.
The tongue (or palm) is a five-bar parallel manipulator that is direct-driven by two brushless gimbal motors, which can achieve force control, virtual compliance, and rapid motion.
The beaks (or fingers) are actuated by two servo motors that morphs the adaptive linkages of the gripper.
GitHub page for technical details: parrot_gripper
Gecko-Inspired Adhesive Gripper [Research]
This gripper is built with adhesive silicon pads that contain wedges in micrometer scale, which designed to imitate the adhesive sturcture on gecko's finger.
This synthetic structure can create large adhesive force on a smooth surface when a shear force is applied. Our gripper built with two pairs of counteracting pads produces the adhesive force by preloading springs before attaching to the smooth surface.
After contacting with the surface, the springs are released to create shear force on the pads, which will adhered to the surface.
Humanoid Robot [Competition]
This humanoid robot is built for the ROBO-ONE, which is a competition in Japan for humanoid boxing combat.
Our robot is designed to fight autonomously, which has a depth camera for recognizing opponents. The robot is built with aluminium sheet metal and carbon fibre plate to reduce weight while having sufficient strength.
17 DYNAMIXEL servo motors are used to actuated the humanoid for provide large torque at the joints. We awarded first running-up in the game.
Racing Balance Robot [Competition]
This robot is built for the NXP Cup in China region, which is an autonomous racing competition. Our robot is built for the magnetic balance group, which used a two-wheel car model to follow the track where has magnetic wire beneath.
Our goal is to complete the track as fast as possible while balancing all the way through. Our control algorithm is able to stablize the attitude at the speed of 1.5m/s while following the track. We awarded in the second class of the match.
High-Speed Scooping: An Implementation through Stiffness Control and Direct-Drive Actuation
Ka Hei Mak, Pu Xu, and Jungwon Seo
Published in IEEE ICRA2023
Robust Ungrasping of High Aspect Ratio Objects Through Dexterous Manipulation
Ka Hei Mak, Chung Hee Kim, and Jungwon Seo
Published in IEEE RA-L and presented in ICRA2022
Planning for Dexterous Ungrasping: Secure Ungrasping Through Dexterous Manipulation
Chung Hee Kim, Ka Hei Mak, and Jungwon Seo
Published in IEEE RA-L and presented in ICRA2022





























